首先,您為Trig和Echo引腳分別分別建立變數,稱為 trigPin 和 echoPin。trigPin引腳連接到pin 11,而echoPin連接到 pin 12:
int trigPin = 11;
int echoPin = 12;
您還將建立三個long類型的變數: duration, cm, inches。duration變數儲存發射和接收信號之間的時間。cm 變數將以厘米為單位保存距離,而 inches 變數將以英寸為單位保存距離。
long duration, cm, inches;
在 setup()裡面,以9600的波特率初始化串行端口,並將trigPin引腳設置為輸出,並將echoPin引腳設置為輸入。
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
在 loop()裡面,通過發送10微秒的HIGH脈衝來觸發感測器。但是,在此之前,請提供一個短的LOW脈衝,以確保獲得乾淨的HIGH脈衝:
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
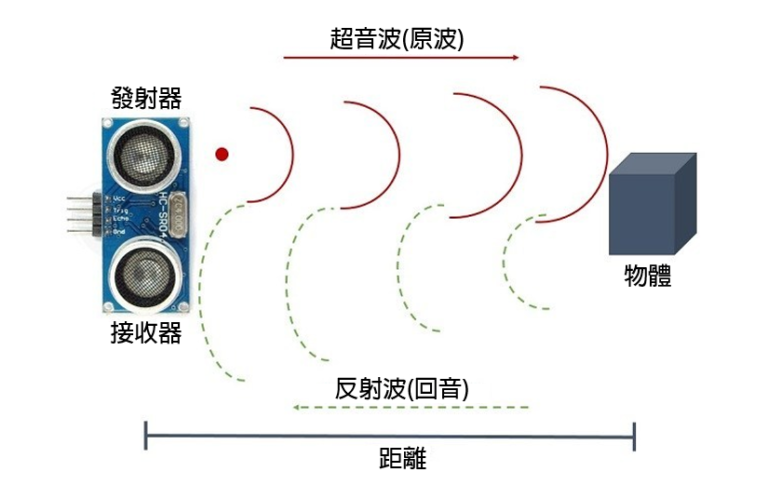
然後,您可以從感測器讀取信號-一個HIGH脈衝,其持續時間是從信號發送到接收到物體的回波之間的時間(以微秒為單位)。
duration = pulseIn(echoPin, HIGH);
最後,您只需要將持續時間轉換為距離即可。我們可以使用以下公式計算距離:
distance = (traveltime/2) x speed of sound
The speed of sound is: 343m/s = 0.0343 cm/uS = 1/29.1 cm/uS
Or in inches: 13503.9in/s = 0.0135in/uS = 1/74in/uS
我們需要將 traveltime 除以2,因為我們必須考慮到波浪已發送,撞擊物體,然後返回到感測器。
cm = (duration/2) / 29.1;
inches = (duration/2) / 74;
最後,我們在串行序而監視器中印出結果:
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
 引腳
引腳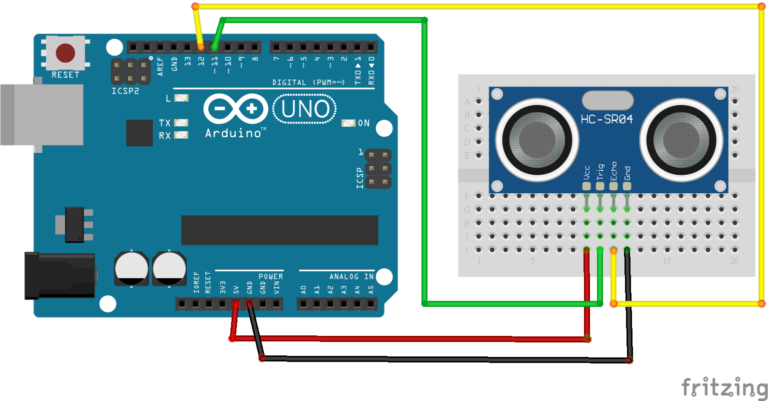

{kind=link}